An assistance feature designed to pioneer a path for the future of agriculture

A joint development project undertaken in collaboration with
the National Agriculture and Food Research Organization in
Japan under the Project for the Urgent Development of
Agricultural Machinery (Urgent Project)
Ridging work is the basic work undertaken on farms. Creating straight, evenly spaced ridges is the
first step for mechanizing sowing, tending, and harvesting processes. SMARTEYEDRIVE
helps operators steer in straight lines with ease and low-cost, simple operations.
SMARTEYEDRIVE. Welcome to the dawn of a new age of agriculture.

Manufacturing from the perspective of users entails not mere thoughts but actions
instead. The reality is that it is not an easy task to position yourself on the ground and
plow in such a way that features that appear straight as a matter of course are formed. Our
mission is to sow the seeds of life and find kernels of technology. We will continue to
engage in manufacturing today by seeking technologies that are truly needed.
Mechanisms for providing straight-advancing support
Comfortable operations are facilitated and a safety system contributes to safe operation.
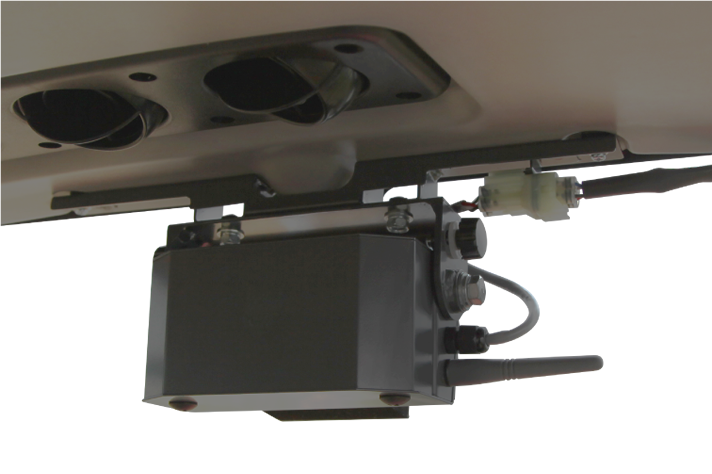
Monocular camera and
image-processing unit
A miniature module integrating a camera and processor is adopted. Camera images are used to detect any displacement from the direction of gravel when traveling forward or tracking in a straight line. Instructions are then accordingly transmitted to the steering system.
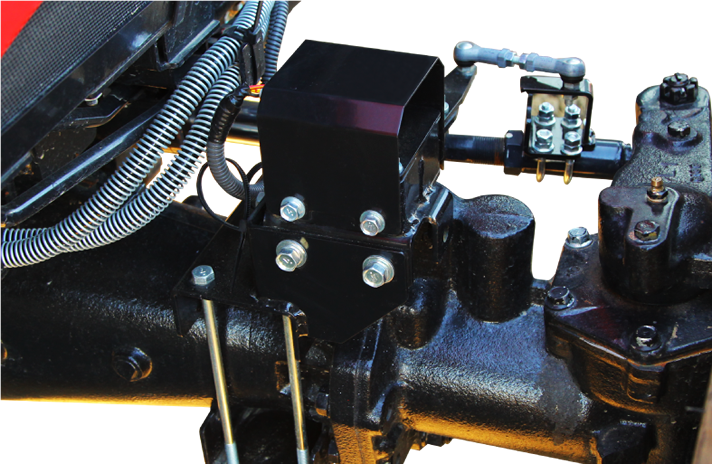
Steering unit
The steering unit receives steering instructions based on camera images and provides steering assistance with the use of a built-in motor. A stepping motor allows for steady control even at ultra-low speeds.

Steering sensor
Sensor attached on front axle detects front-wheel steering angle when the steering assistance is engaged.
Operating panel

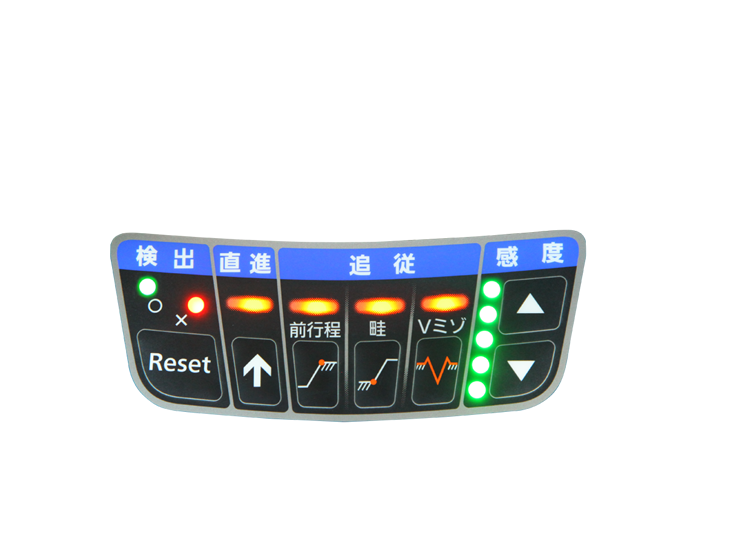


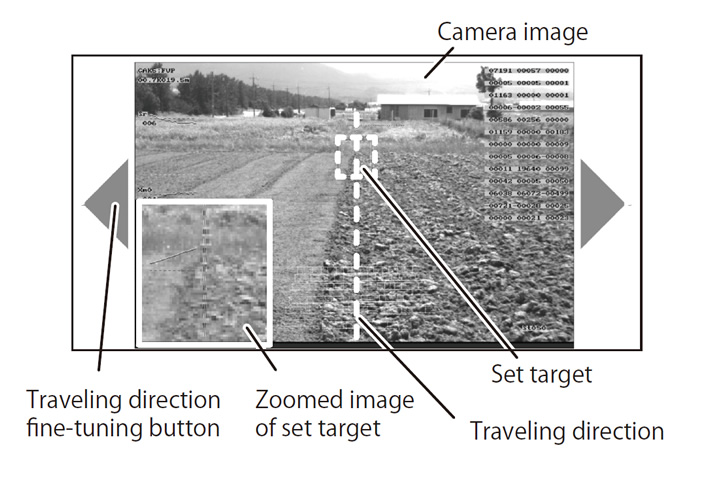
Pursued functions for traveling forward in straight line
Operator can check traveling direction with image and marker on display securely which contributes to precise operation.
Built-in Wi-Fi
Establish a W-Fi connection with your smartphone or other such device to verify traveling direction on display.
For two types of basic work
This function is primarily used for the first pass of a field when starting work. This function controls and guides the vehicle forward along a line connecting a distant target point within the field of view captured by the camera and forward-start position.
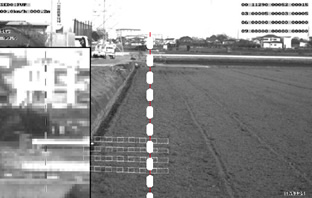
This function is primarily used for the second and additional rows. It works by controlling and guiding the vehicle forward in line along with previous row as tracked by this function.
*Processed to easily see the vehicle’s centerline and detection line. Images can be checked using a smartphone or other such device.
Convenient attachment
A front marker to facilitate distance alignment with the previous row is available as an optional item.

Traveling forward in straight manually is stressful operation, if you watch this video, you might feel traveling forward in straight is easy operation with surprise.
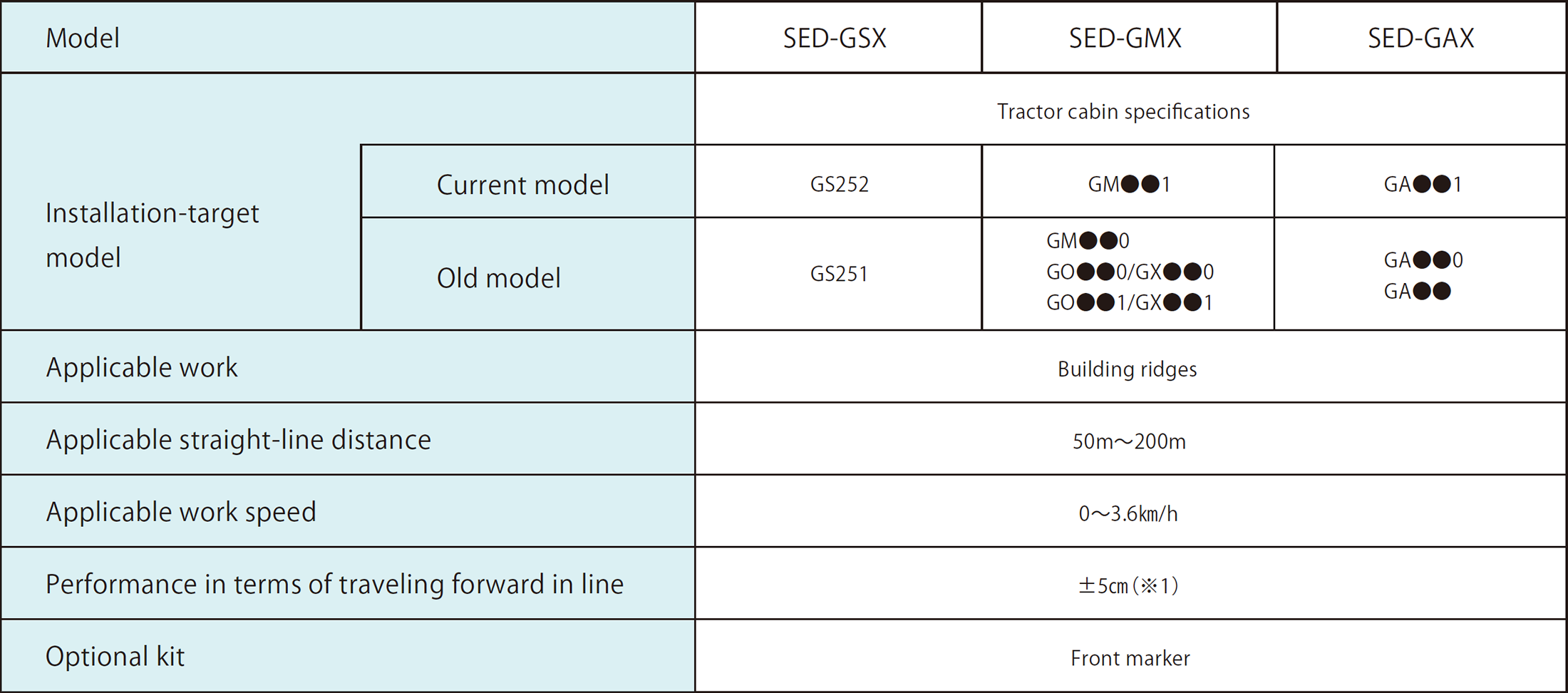
*1 Working accuracy may be negatively affected where the plow pan is uneven and in accordance with the surrounding environment.
*SMARTEYEDRIVE is a steering-assistance system and not an automatic-driving system. Do not leave the driver’s seat during operation.
*Do not use SMARTEYEDRIVE outside of a field. Make sure to turn off switch whenever vehicle is not situated in a field.
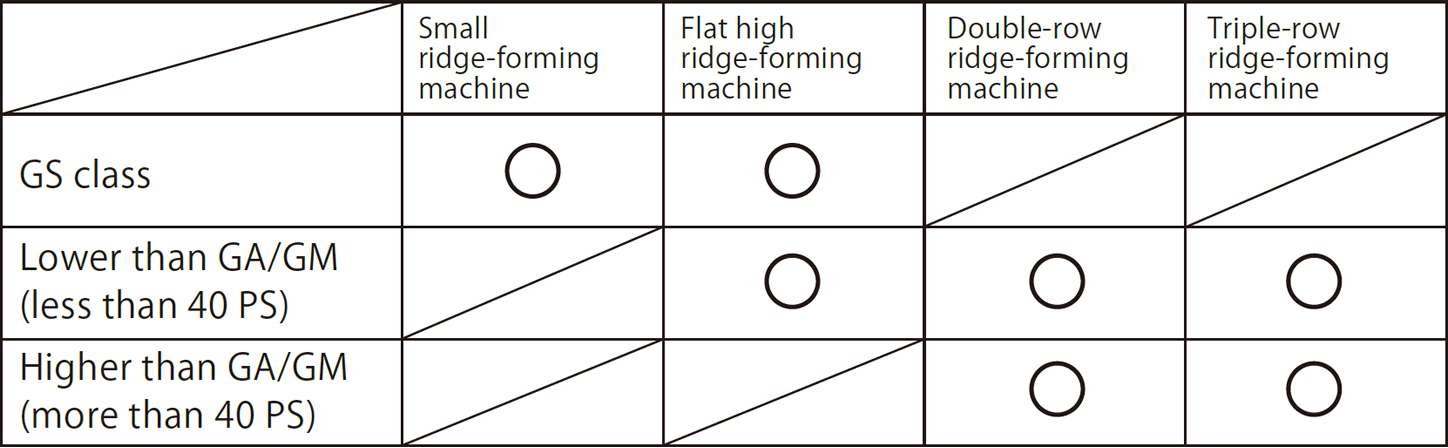
Table of recommended work
*For curved tracking work, tracked traveling along a curvature with a radius of 400 meters or more is possible.
When engaging in work on curves, however, the interval between rows may deviate by more than 10 centimeters.
For more detailed information, see your local Mitsubishi Agricultural Machinery distributor.
Applicable work environment
(i) Dry-field which is capable of traveling forward in straight line at least 50 to 200 meters in distance.
(ii) Flat field with no sloped sections
(iii) Field with a distinctive landscape towards the front
Non-applicable work environment
(i) Nighttime work
(ii) Work in rainy conditions
(iii) Fog
(iv) Water’s surface (puddling and other forms of water-filling work)
(v) Backlit conditions
(vi) Field with just a horizon or any other field lacking a front target
(vii) Hilly area with differences in elevation or lopsided sections
(viii) The camera’s front-facing glass is dirty
(ix) Uncultivated field (must first undergo coarse plowing)


